CAN Bus通信による移動体・産業機器との連携
| 設計内容分類 | RaspberryPi活用 |
|---|
実現したい仕様・課題
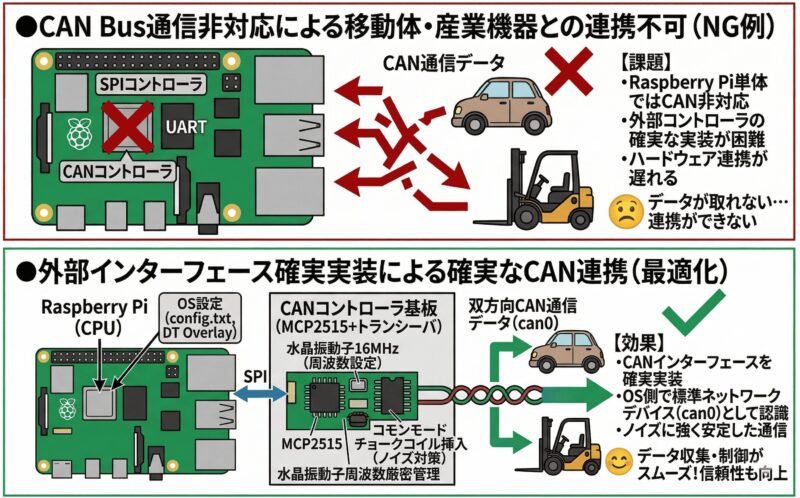
車載ネットワークや自動搬送車(AGV)、特殊車両の制御で標準的な「CAN Bus」を利用してデータを収集・制御したいという課題があります。Raspberry Pi単体ではCANコントローラを持たないため、外部インターフェースの確実な実装が必要です。
設計のポイント
SPI接続のCANコントローラ(MCP2515など)とトランシーバを組み合わせた回路を設計します。OS側では config.txt を編集し、Device Tree Overlayによって標準的なネットワークデバイス(can0)として認識させます。この際、コントローラに使用する水晶振動子の周波数設定が通信レートに直結するため、ハードウェアと設定値の整合性を厳密に管理します。また、ノイズ対策として通信ラインへのコモンモードチョークコイルの挿入が効果的です。
設計のポイント 一覧
RaspberryPi活用のポイント
- ハードウェア・ボタンによる電源操作(シャットダウン・起動)
- MIPI DSIコネクタによる組み込みディスプレイの直結
- 外部EEPROMによる個体識別と校正データの保持
- 1-Wireプロトコルによる多地点・配線節約センシング
- UPS(無停電電源装置)連携による安全な停電処理
- PCIe(M.2)インターフェースによる超高速通信・拡張
- I2S(Inter-IC Sound)によるデジタルオーディオの入出力
- Compute Module 4/5 (CM4/CM5) を用いた製品組込の最適化
- 起動時自己診断(セルフテスト)と状態通知
- デバイスツリー・オーバーレイによるピン機能の固定化
- BLEを活用した配線レス・マルチセンサ集約
- 広範囲入力電圧(DC12V/24V)への対応設計
- CSI-2インターフェースを利用した低遅延画像入力
- LTE/4Gモバイル回線を利用した遠隔監視
- CAN Bus通信による移動体・産業機器との連携
- 外付け電源監視ICによるハードウェア・リセットの自動化
- 産業用DINレールマウント対応の筐体設計
- RS-485通信におけるデータ送受信切替の自動化
- NVMe SSDからのOSブートによる高速化と高信頼化
- 固定IPアドレス設定によるネットワーク安定化
- 起動ロゴ(スプラッシュスクリーン)のカスタマイズ
- サーマルスロットリング防止のための熱設計
- PoE(Power over Ethernet)による配線省力化
- Modbus TCP/RTUを用いた産業機器との連携
- I2C通信における配線長とプルアップ抵抗の最適化
- 外部RTC(リアルタイムクロック)モジュールの追加
- RAMディスク(tmpfs)へのログ出力によるSDカードの長寿命化
- GPIOへのフォトカプラ絶縁回路の採用
- ハードウェア・ウォッチドッグタイマ(WDT)の利用
- 赤外線通信を活用した非接触・遠隔操作インターフェースの実装
- spidevを活用した標準的なSPI通信の実装
- 組み込み機器への簡易GUI採用による操作性の向上と開発効率化
- Raspberry Piを活用した低コストな生産現場向け情報表示板の製作
- SPIバッファサイズの拡張による高速・大容量通信の安定化
- RaspberryPiでシャットダウンフリー化を実現
- Raspberry PiをPLC通信アダプタ(ゲートウェイ)として活用
- RaspberryPi OSの日本語環境構築と最適化